PyCharm
PyCharm
PyCharm相关笔记
pycharm各种开发环境配置
ROS开发
PyCharm在设置项目解释器后默认是没有添加ros的环境,在设置->文件->项目->Python解释器->python解释器中,选择全部显示
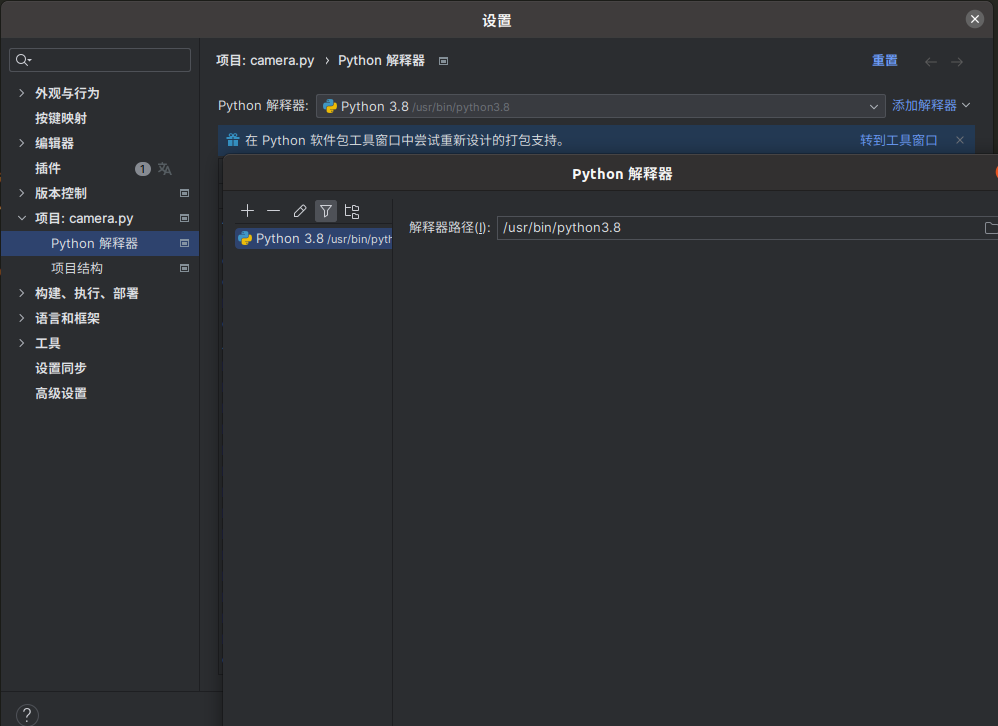
选择最右侧的查看解释器路径
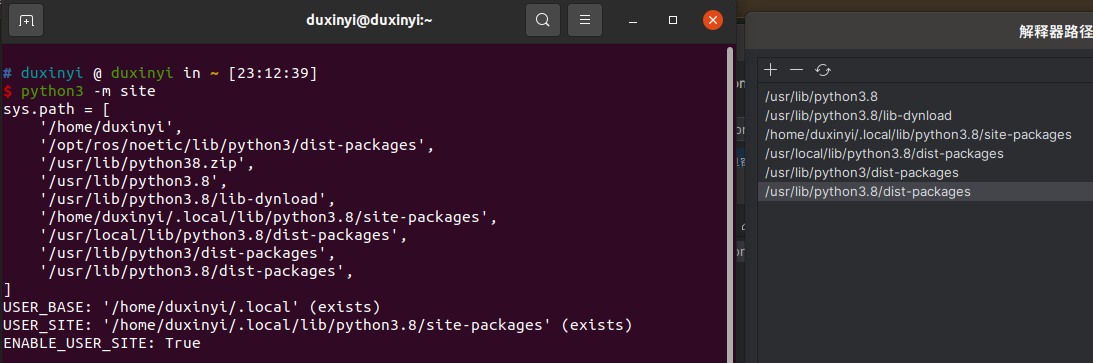
由此可以看出,在PyCharm中没有包含ros的库,将其添加进解释器路径即可进行ros开发
后续使用自定义消息时,同样需要将工作空间内/devel/lib/python3/dist-packages添加进解释器路径
opencv冲突
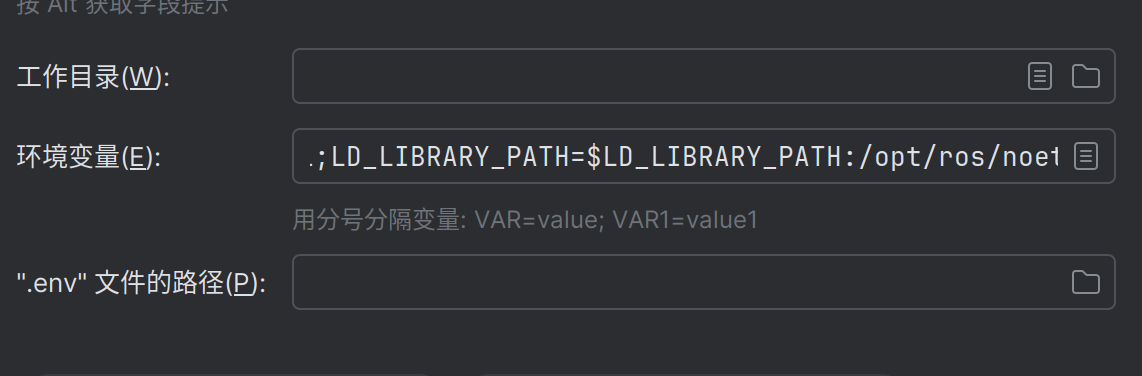
ros安装的cv_bridge库会与pip安装的opencv相关环境存在冲突,进而会导致与opencv相关的代码出现各种问题。
在编辑配置中设置环境变量,添加LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/opt/ros/noetic/lib
代理设置
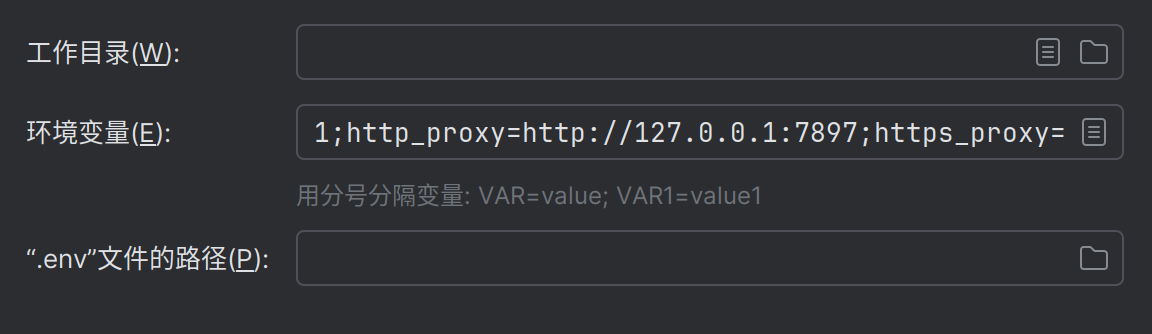
在编辑配置中设置环境变量,添加http_proxy=http://127.0.0.1:7897;https_proxy=http://127.0.0.1:7897
This post is licensed under CC BY 4.0 by the author.